Contrairement aux moteurs couples traditionnels, les unités TK ont à la fois une capacité de couple élevé et de vitesse élevée. Ils peuvent donc être utilisés à la fois comme moteurs de broche (électrobroches) et comme moteurs couple (entrainement de table rotative, plateaux d’usinage, positionneurs…)
Les rotors utilisent des aimants spéciaux fabriqués par Phase Motion Control avec un facteur de perte minimisé permettant un fonctionnement à haute vitesse avec un rotor isotrope mince.
Les moteurs TK sont des servomoteurs triphasées à aimants permanents en terre rare (fer, néodyme, bore) et atteignent la plus haute densité de couple continu et de pointe disponible aujourd’hui, ainsi qu’une capacité de contrôle de la vitesse et du flux sur une plage de puissance constante allant jusqu’à 10:1.
Les moteurs couples TK sont constitués d’unités de stator et de rotor fournies séparément et adaptées au montage direct à l’intérieur de la structure de la machine.
Tous les rotors sont des unités rigides avec un maintien mécanique de l’aimant sans colle via un manchon en fibre de carbone préchargé pour un fonctionnement sûr même à très haute vitesse.
Les rotors sont souvent des unités semi-spécifiques qui permettent un couplage direct avec les roulements, les codeurs et les freins.
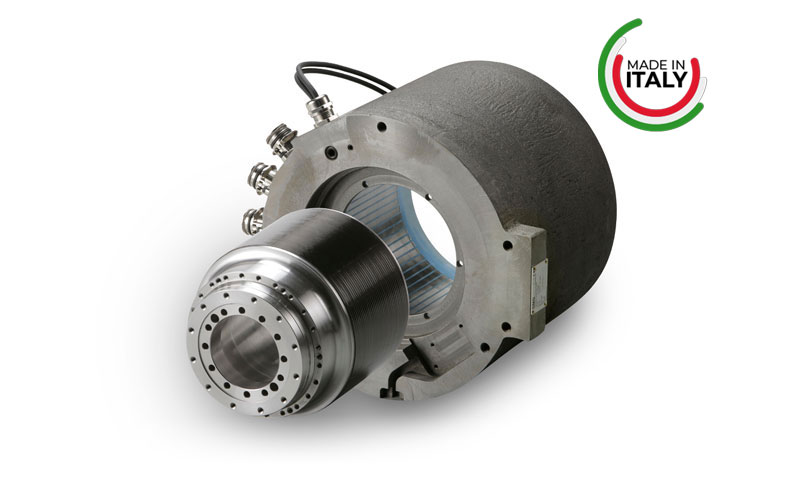
Des carcasses personnalisés avec refroidissement intégré ou même des sous-ensembles partiels de machine avec roulements et codeurs sont fabriqués sur demande sur la base des circuits magnétiques standard disponibles.
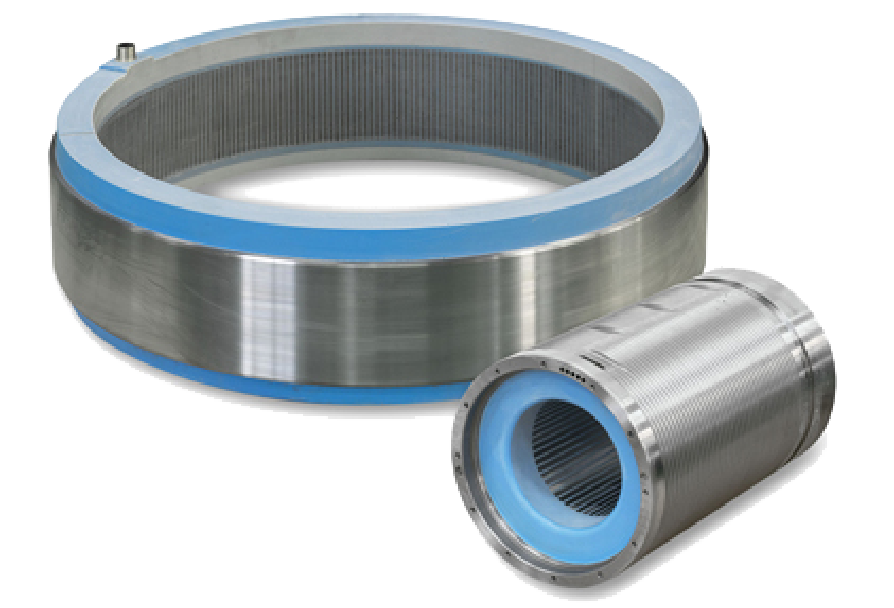
Les moteurs TK se composent de :
Un stator triphasé bobiné et soit imprégné (3 trempages, solution préférée pour les cycles thermiques élevés), soit encapsulés sous vide dans un composé à très haute conductivité thermique, qui est soit intégré dans une micro-carcasse en acier fin, cylindrique, soit dans une carcasse métallique portant les chambres de refroidissement et les joints toriques et un ensemble de trous taraudés sur un côté (finition standard).
Les unités « microframe » sont rectifiées avec une tolérance h7 sur le diamètre extérieur et sont usinées parallèlement sur les deux côtés du paquet de tôles. Cette construction est destinée à un ajustement serré ou à un verrouillage par pression axiale.
La technologie microframe maximise l’utilisation de l’espace dans l’assemblage et exige que le corps de la machine porte les cavités de refroidissement à l’intérieur. Elle nécessite une certaine attention dans la conception de l’application, mais permet d’obtenir la meilleure densité d’espace et de puissance possible aujourd’hui.
Par ailleurs, la carcasse standard (type « SQUID ») est beaucoup plus simple à utiliser et ne nécessite qu’une cavité cylindrique, tandis que l’assemblage et la fixation du moteur se font par un simple jeu de vis. La densité de couple obtenue légèrement inférieure à celle de la micro-carcasse en raison de l’épaisseur de la douille est en grande partie compensée par l’encapsulation dans la résine qui améliore l’échange thermique.
L’ensemble des composants du système d’isolation des moteurs est en classe H ou supérieure (fil : classe C) sauf la résine qui est en classe F, une résine spéciale classe H est disponible en option pour les applications spécifiques; Le bobinage profite d’un isolement renforcé spécialement conçu pour les DV/dt élevés typiques de l’application des servomoteurs 600 Vdc ; les enroulements sont équipés de trois capteurs PTC pour la protection et d’une sonde de température linéaire PT1000 pour la surveillance du processus.
Le point étoile de l’enroulement est aussi généralement disponible à des fins de filtrage. Tous les enroulements sont testés en usine pour une isolation de 4,5 kVdc à la terre et de 3,5 kVdc phase à phase, bien au-delà des exigences réglementaires.
Un rotor à aimants permanents, de forme tubulaire et isotrope à la base, qui porte les aimants sur la périphérie extérieure, protégé par un anneau en fibre de carbone préchargé (autorisant une vitesse périphérique jusqu’à 150 m/sec).
Les aimants sont généralement des aimants frittés FeNdB haute température et haute énergie, fabriqués à l’aide d’une technologie spéciale brevetée. Ils sont conçus pour la température maximale de la classe et sont pratiquement impossibles à démagnétiser, sauf en cas de défaillance du variateur ou de mauvais fonctionnement. Si une exposition continue à l’huile est prévue, des aimants spéciaux résistant à l’huile peuvent être spécifiés.
Le rotor peut être fixé sur l’arbre soit par ajustement serré, soit par un ensemble de boulons axiaux. Cette dernière construction est préférable pour les applications à couple élevé et à faible vitesse telles que les tables rotatives. En général, le profil intérieur du rotor est personnalisé pour s’adapter aux besoins de la machine, à condition que le profil requis soit compatible avec le diamètre interne maximal requis par le champ magnétique, et spécifié dans les fiches techniques correspondantes.
Pour un fonctionnement correct, les moteurs ont besoin d’un capteur de position sur l’arbre (non fourni) à la fois pour l’orientation du champ et pour le contrôle de la position/vitesse.
Le rotor est de type aimant permanent et ne présente pas de pertes primaires, de sorte qu’aucun refroidissement du rotor n’est en principe nécessaire. Cependant, la fréquence du hacheur de l’onduleur doit être suffisamment élevée pour garantir que le courant d’ondulation, pk-pk, est inférieur à 20 % du courant efficace nominal afin d’éviter l’apparition de pertes inacceptables et dangereuses dans le rotor.
Des carcasses personnalisés avec refroidissement intégré ou même des sous-ensembles partiels de machine avec roulements et codeurs sont fabriqués sur demande sur la base des circuits magnétiques standard disponibles.
Les rotors sont fournis non équilibrés ; le fonctionnement à grande vitesse nécessite un équilibrage dynamique lors du montage sur l’arbre de l’application.
Moteurs à anneau mince et à grand diamètre pour un couple élevé et une faible vitesse (moteurs couples)
Applications typiques :
Dans toutes ces applications, l’entraînement direct élimine le jeu et supprime la nécessité d’un réducteur mécanique précis, qui limiterait à son tour la précision et les performances dynamiques du système. Les diviseurs mécaniques sont inutiles. La précision de la table est alors la précision du capteur de position. Le système est donc extrêmement simple, flexible et reprogrammable.
La suppression du système de transmission, de son jeu et de son élasticité permet d’obtenir une bande passante de contrôle allant jusqu’à 250 Hz, de sorte qu’un cycle de positionnement peut être achevé avec une grande précision dans un délai de quelques msec, avec un avantage sur le temps de cycle de la machine. Pour garantir des performances d’asservissement adéquates dans les applications de haute précision et de haute rigidité à entraînement direct, telles que l’indexation et les tables rotatives des machines-outils à commande numérique, le capteur doit être sinusoïdal afin que l’entraînement puisse interpoler la position réelle avec une résolution au moins dix fois supérieure à la précision requise. En outre, la fixation du capteur ou le support à ressort doit avoir une fréquence de résonance intrinsèque supérieure à 2000 Hz pour ne pas limiter les performances globales du système.
Moteurs de broches pour fraises et tours
Moteurs longs et fins, sans balais avec capacité de contrôle du flux, vitesse moyenne à élevée, densité de puissance élevée, adaptés à l’usinage lourd ou au contrôle d’inertie élevée pour l’enroulement/déroulement de bobines. Les moteurs TK ont actuellement la densité de puissance la plus élevée et permettent de fabriquer des électrobroches avec un couple jusqu’ici inatteignable, de l’ordre de plusieurs milliers de Nm, tout en atteignant des vitesses élevées de l’ordre de plusieurs milliers de tours/minute. Les moteurs de type broche sont de toute façon des servomoteurs à haute performance. Un autre domaine d’application émergent est donc le positionnement avec des cycles à haute fréquence. Les applications récentes sont l’entraînement direct du coulisseau d’une poinçonneuse à tourelle à grande vitesse avec des taux de course supérieurs à 300 coups/min, ou l’indexation rapide et lourde dans les machines à souder les cadres métalliques.
Applications typiques :
Moteurs tubulaires, de petit diamètre, pour unités à broches multiples
| Taille standard des câbles de raccordement par rapport au courant nominal du moteur | |
| PTFE insulation, 2500 Vac, L=500 mm | |
| Nominal current | Wire size |
| In < 15 Arms | 1.22 mmq = AWG 16 |
| 15 Arms <= In< 25 Arms | 2.97 mmq = AWG 12 |
| 25 Arms <= In< 45 Arms | 8.6 mmq = AWG 8 |
| 45 Arms <= In< 82 Arms | 15 mmq |
| 82 Arms <= In< 110 Arms | 25 mmq |
| 110 Arms<=In< 200 Arms | 50 mmq |
Tout d’abord, définissez la faisabilité technique de l’application. En général, tous les moteurs partagent la même limitation physique, c’est-à-dire la capacité à générer une « poussée d’entrefer », c’est-à-dire une poussée latérale entre le stator et le rotor qui est une poussée linéaire dans un moteur linéaire, et qui devient un couple lorsque le moteur est rond. La quantité de poussée par unité de surface dépend de la technologie du moteur mais est fondamentalement limitée par les propriétés des matériaux (aimants, cuivre, acier) utilisés dans les moteurs. La technologie PM offre la poussée spécifique la plus élevée disponible aujourd’hui, et cette valeur est progressivement augmentée au fur et à mesure que la technologie s’améliore. De nombreux facteurs (conditions de refroidissement, taille, épaisseur de l’entrefer, vitesse linéaire, etc.) affectent cette valeur qui ne doit être utilisée qu’à titre indicatif. Les moteurs rotatifs TK et les moteurs linéaires Wave se caractérisent par une poussée maximale d’environ 8000 N/m2, une poussée continue avec refroidissement par eau d’environ 5500 N/m2.
La limitation de la poussée explique pourquoi il convient toujours d’utiliser le diamètre maximal disponible pour maximiser le couple de sortie. En général, si un moteur est mis à l’échelle en diamètre, le couple est mis à l’échelle avec le carré du diamètre, alors qu’il n’est mis à l’échelle que linéairement en longueur. Par conséquent, pour vérifier si une nouvelle application est réalisable, si la disponibilité du couple est censée être une limitation, le diamètre maximal disponible doit être déterminé de manière compatible avec la limitation physique et la vitesse périphérique maximale (les valeurs inférieures à 150 m/sec ne posent aucun problème) et la surface de l’entrefer peut alors être évaluée. Cela donnerait une estimation approximative de la longueur du moteur et indiquerait donc si l’application est réalisable ou non.
Les anneaux de grande taille avec une longueur axiale très limitée sont la solution la plus efficace pour les applications à couple élevé et à faible vitesse. Ils présentent l’avantage supplémentaire de ne pas nécessiter de roulements séparés, car ils peuvent généralement être portés par les mêmes roulements que la charge. Cependant, l’inertie est proportionnelle au cube du diamètre, donc où l’inertie est la charge dominante, les moteurs longs et fins sont plus appropriés. Un exemple typique est l’entraînement direct du coulisseau des poinçonneuses à grande vitesse, dans lesquelles le mouvement est inversé plus de 300 fois/min, ou dans les cisailles volantes à grande vitesse ; dans ce cas, les moteurs tubulaires TK refroidis à l’eau constituent la solution la plus performante.
Les entraînements à broche exigent généralement un couple et une vitesse élevés, mais le diamètre est généralement limité, de sorte qu’ils ont tendance à être longs et fins. Des rapports diamètre/longueur des trous d’entrefer allant jusqu’à 1:3 sont couramment fabriqués. Dans ce cas, la technologie des aimants permanents de Phase autorise la fabrication de rotors et stators extrémement fins particulièrement utiles pour les applications multibroche.
Les moteurs de broche à aimants permanents fabriqués avec la technologie magnétique de Phase peuvent fonctionner à la fois en mode couple constant et en mode puissance constante. La plage de puissance constante, selon le type, peut dépasser 10:1, bien que cela soit généralement limité par la capacité de l’entraînement choisi à contrôler une plage de défluxage profond.
Par rapport aux moteurs de broche à induction à courant alternatif, la conception du moteur à aimants permanents offre :
Dans la technologie des moteurs TK de Phase, il n’y a pas de différence physique fondamentale entre les moteurs couples et les moteurs de broche ; ils ont la même stabilité et une bande passante élevée nécessaires à l’indexation et au contournage par entraînement direct, de sorte que les opérations de fraisage et de tournage sur le même moteur sont désormais possibles.
Il existe toutefois une différence fondamentale entre les entraînements de broches à moteur à courant continu et à induction. Dans la technologie de l’induction, la puissance est utilisée pour magnétiser le moteur (à faible vitesse, couple élevé), ce qui limite le couple de sortie disponible ; la réduction du flux est facilement obtenue en réduisant simplement le courant de magnétisation.
Le moteur est donc « chaud » à charge maximale et « froid » à vide. Les moteurs TK, à l’inverse, tirent leur champ d’aimants permanents à haute énergie, de sorte qu’aucune puissance n’est nécessaire pour construire le champ du moteur et qu’une plus grande puissance peut être consacrée à la génération du couple. Cependant, lorsque le flux doit être réduit, il faut appliquer de la puissance juste pour abaisser le champ, de sorte que les moteurs à aimants permanents à grande vitesse ont besoin d’un certain courant même à vide.
Une courbe typique de puissance et de couple en fonction de la vitesse est présentée à la Fig. 1 pour un moteur combiné couple/broche de 570 mm de diamètre et 100 mm de longueur axiale ; à la Fig. 2, la température du moteur à vide et à pleine charge est affichée. On peut observer qu’au-delà de la « vitesse nominale », c’est-à-dire la vitesse de transition entre le fonctionnement à couple constant et le fonctionnement à puissance constante, la température du moteur devient progressivement indépendante de la charge du moteur.
Une autre caractéristique utile de la technologie aimants permanents est la possibilité de fonctionner avec un grand entrefer, jusqu’à plusieurs millimètres dans les moteurs les plus grands. Cette caractéristique peut être utile dans les machines présentant d’importantes déformations, telles que les presses à injection de plastique ou le formage par impact. En règle générale, l’entrefer est de l’ordre de 1 mm dans le sens radial, ce qui permet de réaliser des conceptions dans lesquelles le moteur se déplace sur les supports de la machine sans nécessiter de roulements séparés.
Le flux magnétique dans le rotor génère des forces d’attraction radiales.
Ceux-ci ne sont parfaitement équilibrés que si le rotor se trouve au centre du stator, et augmentent avec l’excentricité. En pratique, cela équivaut à une « rigidité négative » qui doit être compensée par une rigidité positive beaucoup plus élevée dans le système de roulement. Les données d’attraction peuvent être fournies à la demande, l’ordre de grandeur est indiqué dans le graphique de la Fig. 3, pour un moteur couple de 1000 Nm, 370 mm de diamètre, 105 mm de long avec un entrefer radial de 1 mm.
| Torque Motor code | Stack [mm] | L tot.[mm] | Øout [mm] | Øin [mm] | Torque (Water Cooled) [Nm] | Torque (Air Cooled)[Nm] | Peak Torque [Nm] |
Nominal Speed (rpm) | Max Speed (rpm) |
| TK.085 | 50 | 110 | 96 | 44 | 7,30 | 3,70 | 24,10 | 5000 | 18000 |
| 100 | 160 | 96 | 44 | 16,20 | 8,10 | 48,20 | |||
| 150 | 210 | 96 | 44 | 25,40 | 12,70 | 72,30 | |||
| 200 | 260 | 96 | 44 | 34,70 | 17,40 | 96,40 | |||
| TK.110 | 50 | 125 | 121 | 43 | 12,50 | 6,30 | 33,20 | 5000 | 20000 |
| 100 | 175 | 121 | 43 | 26,90 | 13,50 | 66,30 | |||
| 150 | 225 | 121 | 43 | 41,60 | 20,80 | 99,50 | |||
| 200 | 275 | 121 | 43 | 56,30 | 28,20 | 132,70 | |||
| TK.120 | 50 | 125 | 134 | 54 | 21,90 | 11,00 | 47,50 | 5000 | 15000 |
| 100 | 175 | 134 | 54 | 48,20 | 24,10 | 95,10 | |||
| 150 | 225 | 134 | 54 | 75,10 | 37,60 | 142,60 | |||
| 200 | 275 | 134 | 54 | 102,40 | 51,20 | 190,00 | |||
| TK.164 | 50 | 125 | 173 | 76 | 48,30 | 24,10 | 93,50 | 4000 | 10000 |
| 100 | 175 | 173 | 76 | 104,70 | 52,30 | 187,00 | |||
| 150 | 225 | 173 | 76 | 162,10 | 81,10 | 280,40 | |||
| 200 | 275 | 173 | 76 | 219,90 | 110,00 | 374,00 | |||
| 300 | 375 | 173 | 76 | 336,00 | 168,00 | 560,90 | |||
| TK.188 | 50 | 140 | 202 | 80 | 34,80 | 17,40 | 119,50 | 6000 | 28000 |
| 100 | 90 | 202 | 80 | 79,10 | 39,50 | 238,90 | |||
| 150 | 240 | 202 | 80 | 125,80 | 62,90 | 358,40 | |||
| 200 | 290 | 202 | 80 | 173,60 | 86,80 | 477,80 | |||
| 300 | 390 | 202 | 80 | 270,50 | 135,20 | 716,80 | |||
| TK.195 | 50 | 160 | 207 | 76 | 49,50 | 24,80 | 93,50 | 2000 | 15000 |
| 100 | 210 | 207 | 76 | 108,69 | 54,30 | 187,00 | |||
| 150 | 260 | 207 | 76 | 169,20 | 84,60 | 280,40 | |||
| 200 | 310 | 207 | 76 | 230,20 | 115,00 | 374,00 | |||
| 300 | 410 | 207 | 76 | 352,70 | 176,40 | 560,90 | |||
| TK.220 | 50 | 170 | 240 | 110 | 75,60 | 37,80 | 159,00 | 3000 | 14000 |
| 100 | 220 | 240 | 110 | 172,40 | 86,20 | 318,10 | |||
| 150 | 270 | 240 | 110 | 274,40 | 137,20 | 477,10 | |||
| 200 | 320 | 240 | 110 | 378,70 | 189,30 | 636,20 | |||
| 300 | 420 | 240 | 110 | 590,10 | 295,10 | 954,30 | |||
| TK.240 | 50 | 135 | 249 | 142 | 111,20 | 55,60 | 216,50 | 3000 | 8000 |
| 100 | 185 | 249 | 142 | 240,00 | 120,00 | 433,00 | |||
| 150 | 235 | 249 | 142 | 371,30 | 185,60 | 649,40 | |||
| 200 | 285 | 249 | 142 | 465,90 | 251,60 | 865,90 | |||
| TK.270 | 50 | 140 | 282 | 160 | 112,30 | 56,20 | 282,70 | 3000 | 8000 |
| 100 | 190 | 282 | 160 | 253,00 | 126,50 | 565,50 | |||
| 150 | 240 | 282 | 160 | 399,30 | 199,60 | 848,20 | |||
| 200 | 290 | 282 | 160 | 547,70 | 273,90 | 1.131,00 | |||
| TK.310 | 50 | 120 | 310 | 198 | 215,60 | 107,80 | 373,90 | 500 | 3000 |
| 100 | 170 | 310 | 198 | 475,90 | 238,00 | 748,00 | |||
| 150 | 220 | 310 | 198 | 743,30 | 371,70 | 1.121,80 | |||
| 200 | 270 | 310 | 198 | 1.013,00 | 506,60 | 1.495,70 | |||
| TK.340 | 50 | 145 | 358 | 190 | 242,00 | 121,00 | 407,20 | 2000 | 6000 |
| 100 | 195 | 358 | 190 | 547,20 | 273,60 | 814,30 | |||
| 150 | 245 | 358 | 190 | 864,70 | 432,40 | 1.221,50 | |||
| 200 | 295 | 358 | 190 | 1.186,90 | 593,50 | 1.628,60 | |||
| 300 | 395 | 358 | 190 | 1.837,00 | 918,50 | 2.442,90 | |||
| TK.370 | 50 | 140 | 380 | 268 | 271,70 | 135,90 | 636,20 | 1000 | 4000 |
| 100 | 190 | 380 | 268 | 604,50 | 302,20 | 1.272,30 | |||
| 150 | 240 | 380 | 268 | 947,40 | 473,70 | 1.908,50 | |||
| 200 | 290 | 380 | 268 | 1.294,00 | 647,00 | 2.544,70 | |||
| 300 | 390 | 380 | 268 | 1.991,40 | 995,70 | 3.817,00 | |||
| TK.450 | 50 | 170 | 465 | 320 | 468,20 | 234,10 | 916,10 | 1000 | 3000 |
| 100 | 220 | 465 | 320 | 1.033,70 | 516,90 | 1.832,20 | |||
| 150 | 270 | 465 | 320 | 1.613,00 | 806,50 | 2.748,30 | |||
| 200 | 320 | 465 | 320 | 2.196,90 | 1.098,40 | 3.664,40 | |||
| TK.485 | 50 | 145 | 485 | 345 | 544,00 | 213,00 | 1.068,00 | 1000 | 2000 |
| 100 | 195 | 485 | 345 | 1.197,00 | 500,00 | 2.136,00 | |||
| 150 | 245 | 485 | 345 | 1.858,00 | 802,00 | 3.204,00 | |||
| 200 | 295 | 485 | 345 | 2.521,00 | 1.110,00 | 4.272,00 | |||
| TK.540 | 50 | 145 | 548 | 400 | 712,80 | 356,40 | 1.431,40 | 400 | 1500 |
| 100 | 195 | 548 | 400 | 1.547,50 | 773,80 | 2.862,80 | |||
| 150 | 245 | 548 | 400 | 2.397,40 | 1.198,70 | 4.294,20 | |||
| 200 | 295 | 548 | 400 | 3.252,00 | 1.626,00 | 5.725,60 | |||
| TK.570 | 50 | 115 | 578 | 450 | 745,40 | 372,70 | 1.767,10 | 400 | 1500 |
| 100 | 165 | 578 | 450 | 1.673,00 | 836,50 | 3.534,30 | |||
| 150 | 215 | 578 | 450 | 2.632,50 | 1.316,20 | 5.301,40 | |||
| 200 | 265 | 578 | 450 | 3.603,60 | 1.801,80 | 7.068,60 | |||
| TK.795 | 50 | 160 | 815 | 640 | 1.631,10 | 815,50 | 3.365,40 | 200 | 800 |
| 100 | 210 | 815 | 640 | 3.781,20 | 1.890,60 | 6.730,70 | |||
| 150 | 260 | 815 | 640 | 6.063,60 | 3.031,80 | 10.096,10 | |||
| 200 | 310 | 815 | 640 | 8.402,10 | 4.201,10 | 13.461,40 | |||
| TK.1150 | 50 | 190 | 1210 | 908 | 3.495,00 | 1.785,00 | 6.789,00 | 100 | 400 |
| 100 | 240 | 1210 | 908 | 7.996,00 | 4.281,00 | 13.577,00 | |||
| 150 | 290 | 1210 | 908 | 12.696,00 | 6.952,00 | 20.366,00 | |||
| 200 | 340 | 1210 | 908 | 17.457,00 | 9.695,00 | 27.155,00 | |||
| TK.1340 | 50 | 190 | 1420 | 1100 | 4.542,80 | 2.271,40 | 9.842,30 | 100 | 400 |
| 100 | 240 | 1420 | 1100 | 10.639,40 | 5.319,70 | 19.684,60 | |||
| 150 | 290 | 1420 | 1100 | 17.147,10 | 8.573,50 | 29.526,90 | |||
| 200 | 340 | 1420 | 1100 | 23.831,50 | 11.915,70 | 39.369,20 | |||
| TK.1700 | 50 | 190 | 1770 | 1420 | 8.113,80 | 4.056,90 | 15.946,80 | 100 | 300 |
| 100 | 240 | 1770 | 1420 | 18.951,20 | 9.475,60 | 31.893,50 | |||
| 150 | 290 | 1770 | 1420 | 30.480,20 | 15.240,10 | 47.840,30 | |||
| 200 | 340 | 1770 | 1420 | 42.301,80 | 21.150,90 | 63.787,00 | |||
| TK.2000 | 50 | 260 | 2085 | 1700 | 8.587,40 | 4.293,70 | 23.004,10 | 100 | 300 |
| 100 | 310 | 2085 | 1700 | 20.713,90 | 10.356,90 | 46.008,20 | |||
| 150 | 360 | 2085 | 1700 | 34.103,80 | 17.051,90 | 69.012,30 | |||
| 200 | 410 | 2085 | 1700 | 48.132,40 | 24.066,20 | 92.016,40 | |||
| TK.3080 | 50 | 260 | 3170 | 2760 | 24.318,60 | 12.159,30 | 51.035,20 | 100 | 250 |
| 100 | 310 | 3170 | 2760 | 57.331,50 | 28.665,80 | 102.070,30 | |||
| 150 | 360 | 3170 | 2760 | 92.790,20 | 46.395,10 | 153.105,50 | |||
| 200 | 410 | 3170 | 2760 | 129.340,00 | 64.670,00 | 204.140,70 |
Moteur électrique à couple élevé, Servomoteur à couple élevé, Moteur électrique à couple élevé et à bas régime, Moteur électrique à couple élevé et à basse vitesse, Moteur électrique à couple élevé et à bas régime, Petit moteur électrique à couple élevé, Moteur électrique à couple élevé sans balais, Moteur à couple élevé et à bas régime, Moteur électrique à couple élevé et à bas régime., Moteur électrique à courant alternatif à couple élevé et bas régime, Moteur électrique compact à couple élevé, Moteur à couple ultra élevé, Moteur à courant continu à couple élevé, Moteur à courant continu 12v à couple élevé, Moteur à courant continu 12 volts à couple élevé, Moteur à courant continu 12v à couple élevé et bas régime, Moteur à courant continu 24v à couple élevé et haut régime …
22 Rue Jean-Louis Calderon
69120, Vaulx-en-velin – FRANCE
Tél. : 04 72 72 94 90



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}